
目录
快速导航-

国家重点科技项目研究进展专栏 | 微器件产品装配工艺的智能决策
国家重点科技项目研究进展专栏 | 微器件产品装配工艺的智能决策
-
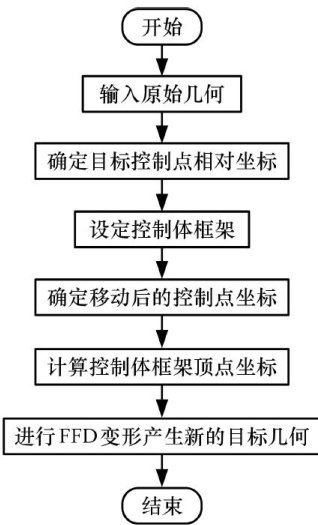
国家重点科技项目研究进展专栏 | 基于预筛选代理模型和直接操纵自由变形参数化的心涡轮气动优化
国家重点科技项目研究进展专栏 | 基于预筛选代理模型和直接操纵自由变形参数化的心涡轮气动优化
-
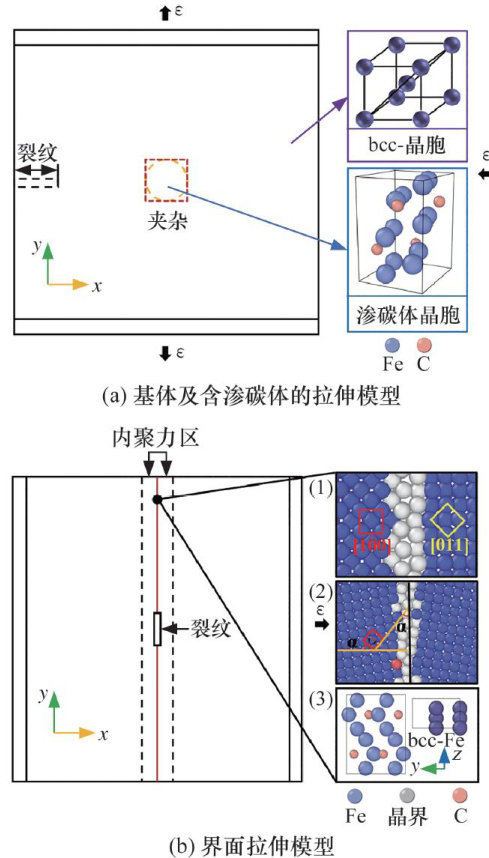
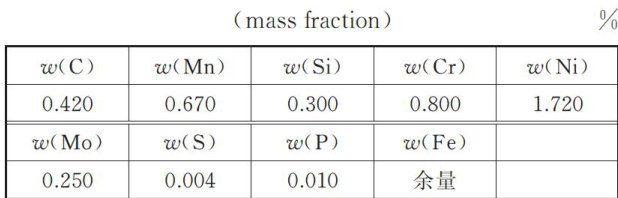
国家重点科技项目研究进展专栏 | 8Cr4Mo4V轴承钢微观裂纹萌生与扩展机制的 分子动力学模拟
国家重点科技项目研究进展专栏 | 8Cr4Mo4V轴承钢微观裂纹萌生与扩展机制的 分子动力学模拟
-
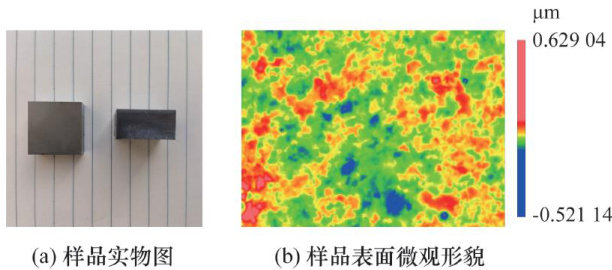
国家重点科技项目研究进展专栏 | 等离子体处理对45钢力学性能影响的试验及分子动力学模拟研究
国家重点科技项目研究进展专栏 | 等离子体处理对45钢力学性能影响的试验及分子动力学模拟研究
-
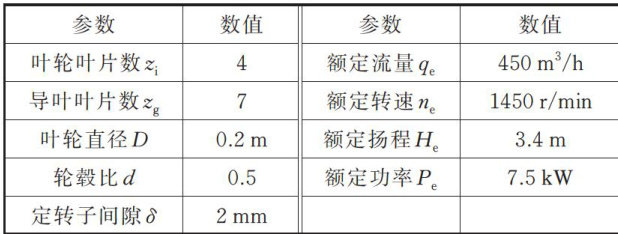
国家重点科技项目研究进展专栏 | 转速和流量对轮缘驱动轴流泵压力脉动的影响
国家重点科技项目研究进展专栏 | 转速和流量对轮缘驱动轴流泵压力脉动的影响
-

国家重点科技项目研究进展专栏 | 干气密封动环表面的螺旋槽纳秒激光制备
国家重点科技项目研究进展专栏 | 干气密封动环表面的螺旋槽纳秒激光制备
-
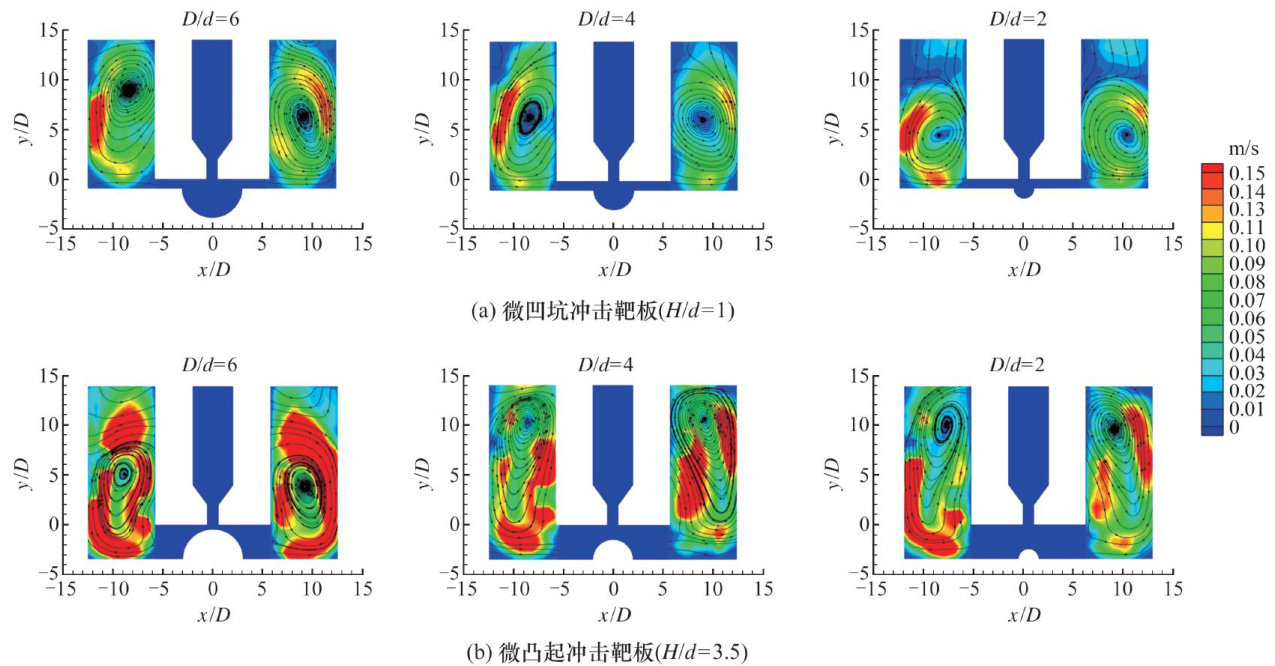
国家重点科技项目研究进展专栏 | 壁面微缺陷影响下的介观尺度冲击射流流场特性
国家重点科技项目研究进展专栏 | 壁面微缺陷影响下的介观尺度冲击射流流场特性
-

机械基础工程 | 基于轮胎侧偏的差动转向机理研究
机械基础工程 | 基于轮胎侧偏的差动转向机理研究
-
机械基础工程 | 磁悬浮列车首次穿越失效可靠性研究
机械基础工程 | 磁悬浮列车首次穿越失效可靠性研究
-
机械基础工程 | 滚压加工AISI4340钢螺纹根部疲劳性能的提高
机械基础工程 | 滚压加工AISI4340钢螺纹根部疲劳性能的提高
-

机械基础工程 | 基于旋转磁力-风致振动的混合式压电振子发电性能
机械基础工程 | 基于旋转磁力-风致振动的混合式压电振子发电性能
-

机械基础工程 | 船用汽轮机极端变工况流场扰动及稳定运行特性
机械基础工程 | 船用汽轮机极端变工况流场扰动及稳定运行特性
-
机械基础工程 | 双列反向台阶型机械密封空化流动与冷却机理
机械基础工程 | 双列反向台阶型机械密封空化流动与冷却机理
-

机械基础工程 | 执行器约束下基于轨迹学习的核正则化最优 迭代学习控制
机械基础工程 | 执行器约束下基于轨迹学习的核正则化最优 迭代学习控制
-

机械基础工程 | 空间薄膜天线变形/姿态耦合动力学与控制
机械基础工程 | 空间薄膜天线变形/姿态耦合动力学与控制
-
机械基础工程 | 管道内缺陷影响下的内检测器密封盘振动疲劳研究
机械基础工程 | 管道内缺陷影响下的内检测器密封盘振动疲劳研究
-
机械基础工程 | 模块化多胞元永磁推力轴承的承载特性
机械基础工程 | 模块化多胞元永磁推力轴承的承载特性
-
机械基础工程 | 电动涡旋压缩机柱销防自转机构载荷优化
机械基础工程 | 电动涡旋压缩机柱销防自转机构载荷优化
-
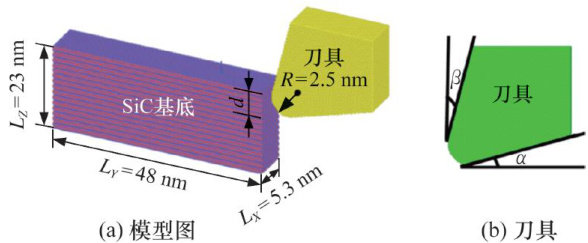
机械基础工程 | SiC硬脆材料纳米切削的亚表层损伤与塑性去除机理探析
机械基础工程 | SiC硬脆材料纳米切削的亚表层损伤与塑性去除机理探析
-
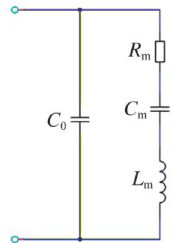
机械基础工程 | 一种压电换能器等效电路参数的实时测量方法
机械基础工程 | 一种压电换能器等效电路参数的实时测量方法
-
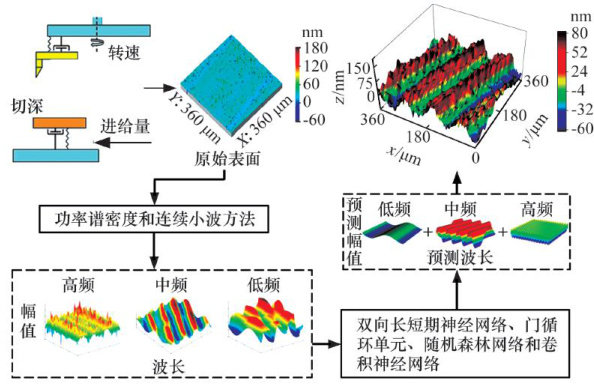
机械基础工程 | 基于深度学习的KDP晶体三维已加工表面形貌预测
机械基础工程 | 基于深度学习的KDP晶体三维已加工表面形貌预测
-
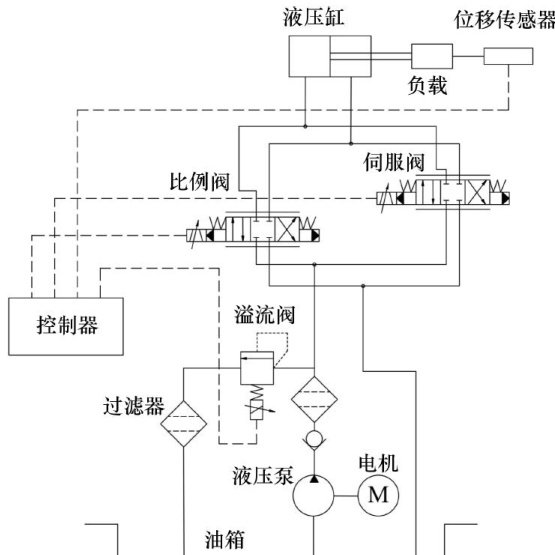
机械基础工程 | 基于强化学习自适应鲁棒控制的异构双阀协调控制策略研究
机械基础工程 | 基于强化学习自适应鲁棒控制的异构双阀协调控制策略研究
-
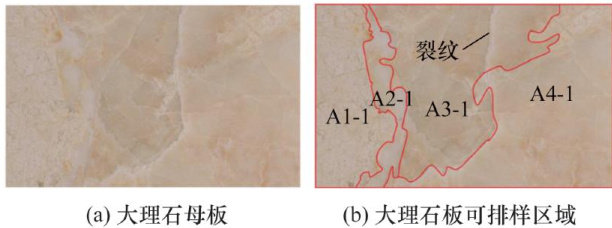
可持续制造 | 基于母板滑动策略的大理石板材排样算法
可持续制造 | 基于母板滑动策略的大理石板材排样算法
-

可持续制造 | 不确定服役环境下废旧零部件损伤-质量状态映射模型
可持续制造 | 不确定服役环境下废旧零部件损伤-质量状态映射模型
-
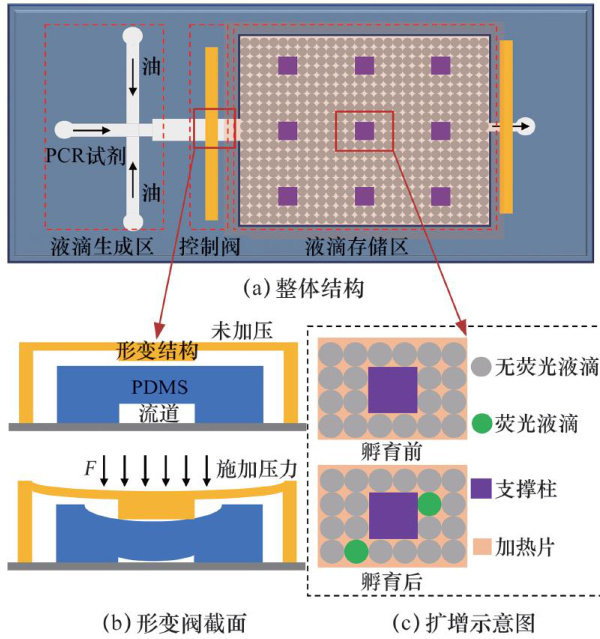
生物制造 | 集成流体与温度控制的液滴型数字PCR微流控芯片设计与应用
生物制造 | 集成流体与温度控制的液滴型数字PCR微流控芯片设计与应用
-
生物制造 | 膝踝关节外骨骼人机匹配性设计与优化
生物制造 | 膝踝关节外骨骼人机匹配性设计与优化
-
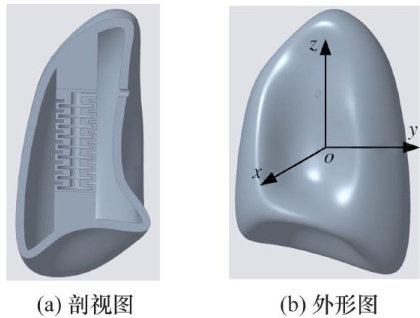
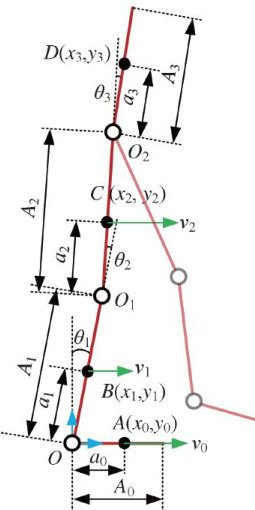
生物制造 | 双驱动器仿肺软体机器人建模与变形分析
生物制造 | 双驱动器仿肺软体机器人建模与变形分析
-
工程前沿 | Ti/A1双金属薄壁件激光辅助旋压成形规律
工程前沿 | Ti/A1双金属薄壁件激光辅助旋压成形规律
-
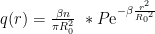
工程前沿 | 连退机组直火加热工艺与控制技术的开发
工程前沿 | 连退机组直火加热工艺与控制技术的开发
-
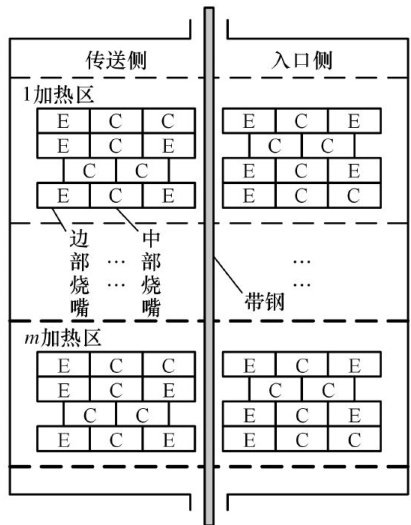
工程前沿 | 基于河冰细观结构的超声辅助切削仿真分析及验证实验
工程前沿 | 基于河冰细观结构的超声辅助切削仿真分析及验证实验
-
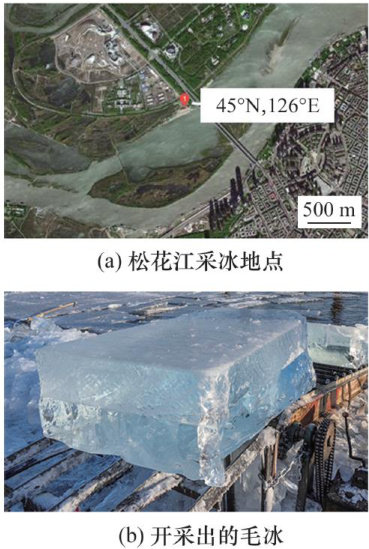
工程前沿 | 联合收获机割台纵向高度-横向倾角协同仿形系统设计与试验
工程前沿 | 联合收获机割台纵向高度-横向倾角协同仿形系统设计与试验
-
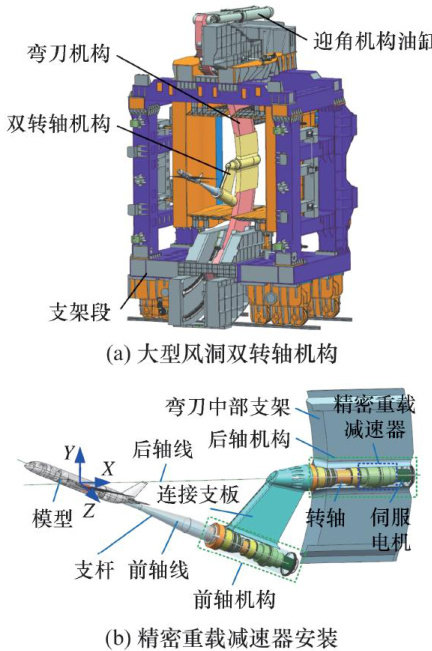
工程前沿 | 大型风洞双转轴机构精密重载减速器研制及应用
工程前沿 | 大型风洞双转轴机构精密重载减速器研制及应用
-
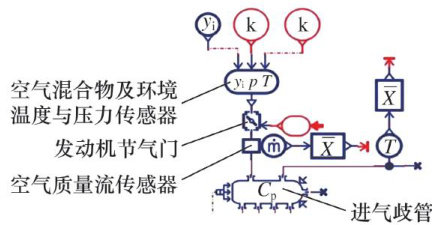
工程前沿 | 基于AMESim-PID-Kriging的通航发动机空燃比控制可靠性分析方法
工程前沿 | 基于AMESim-PID-Kriging的通航发动机空燃比控制可靠性分析方法
-
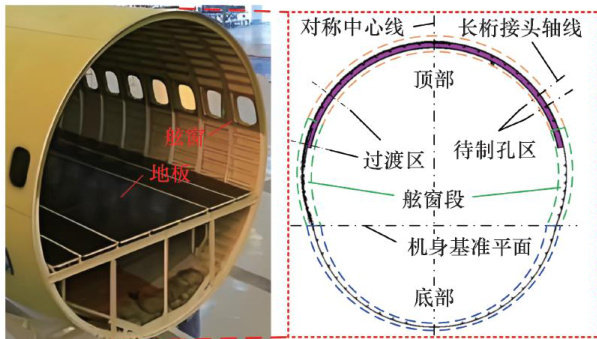
工程前沿 | 大型民用飞机机身对接区双面均衡夹紧装置设计
工程前沿 | 大型民用飞机机身对接区双面均衡夹紧装置设计
-
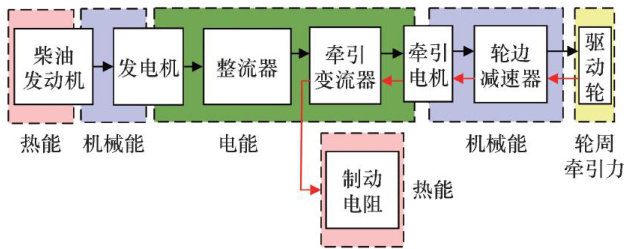
工程前沿 | 百吨级双桥刚性矿用自卸车功率分流型混动系统设计及控制策略研究
工程前沿 | 百吨级双桥刚性矿用自卸车功率分流型混动系统设计及控制策略研究
-
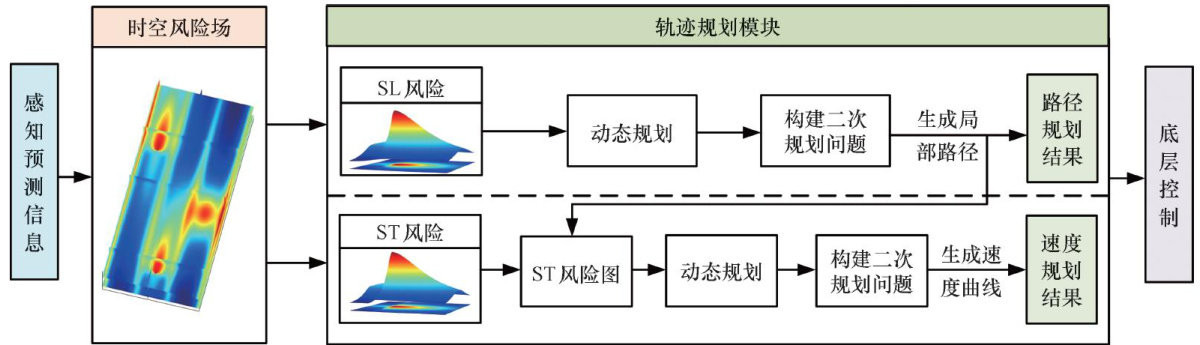
工程前沿 | 基于时空风险场的智能车辆轨迹规划
工程前沿 | 基于时空风险场的智能车辆轨迹规划
-
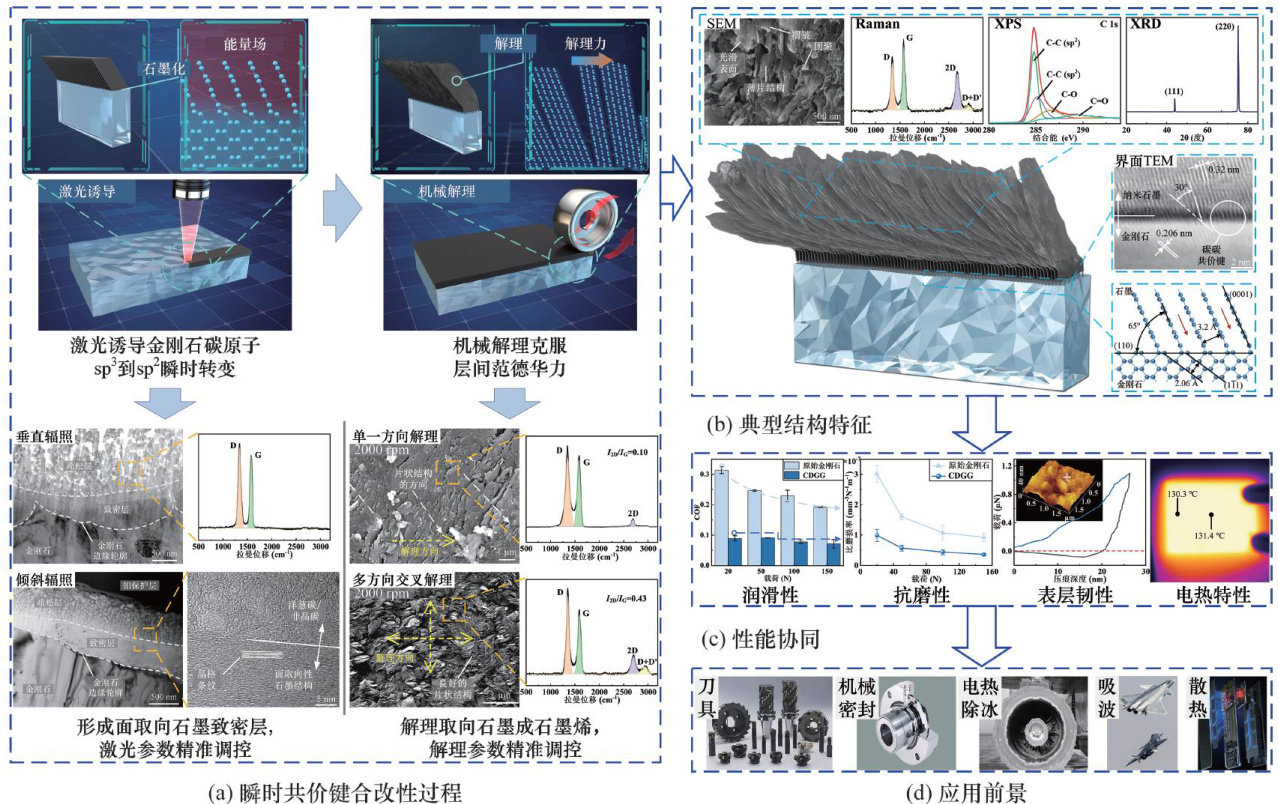
前沿快报 | 金刚石表面石墨烯瞬时共价键合改性
前沿快报 | 金刚石表面石墨烯瞬时共价键合改性










 登录
登录