
目录
快速导航-
综述 | 国外多弹协同项目发展及关键技术展望
综述 | 国外多弹协同项目发展及关键技术展望
-

综述 | 美军空中进攻性电磁作战体系发展及应用研究
综述 | 美军空中进攻性电磁作战体系发展及应用研究
-
综述 | 基于深度学习的无人机可见光目标检测研究综述
综述 | 基于深度学习的无人机可见光目标检测研究综述
-
综述 | 硅基异质结中波红外光电探测器的研究进展
综述 | 硅基异质结中波红外光电探测器的研究进展
-
学术研究 | 基于GRU-KAN的高速飞行器轨迹预测方法
学术研究 | 基于GRU-KAN的高速飞行器轨迹预测方法
-
学术研究 | 融合DDQN与示教学习的高超声速飞行器智能姿态控制方法研究
学术研究 | 融合DDQN与示教学习的高超声速飞行器智能姿态控制方法研究
-
学术研究 | 基于LSTM神经网络的来袭导弹制导律识别方法研究
学术研究 | 基于LSTM神经网络的来袭导弹制导律识别方法研究
-

学术研究 | 基于似然比检验的目标机动检测方法
学术研究 | 基于似然比检验的目标机动检测方法
-
学术研究 | 弹目动态交会下的空中目标电磁散射特性并行计算方法
学术研究 | 弹目动态交会下的空中目标电磁散射特性并行计算方法
-

学术研究 | 基于任务评估反馈的异构无人机动态任务分配
学术研究 | 基于任务评估反馈的异构无人机动态任务分配
-
学术研究 | 基于多策略改进灰狼算法的多无人机三维路径规划
学术研究 | 基于多策略改进灰狼算法的多无人机三维路径规划
-
学术研究 | 基于箔条弹掩护的察打一体无人机质心干扰策略
学术研究 | 基于箔条弹掩护的察打一体无人机质心干扰策略
-
学术研究 | 基于传感器攻击的领导跟随多旋翼蜂群驱离方法
学术研究 | 基于传感器攻击的领导跟随多旋翼蜂群驱离方法
-
学术研究 | 联合LeNet和知识图谱的链路建立行为识别方法
学术研究 | 联合LeNet和知识图谱的链路建立行为识别方法
-

学术研究 | 一种基于高精度数学地平的惯性/天文组合导航方案
学术研究 | 一种基于高精度数学地平的惯性/天文组合导航方案
-
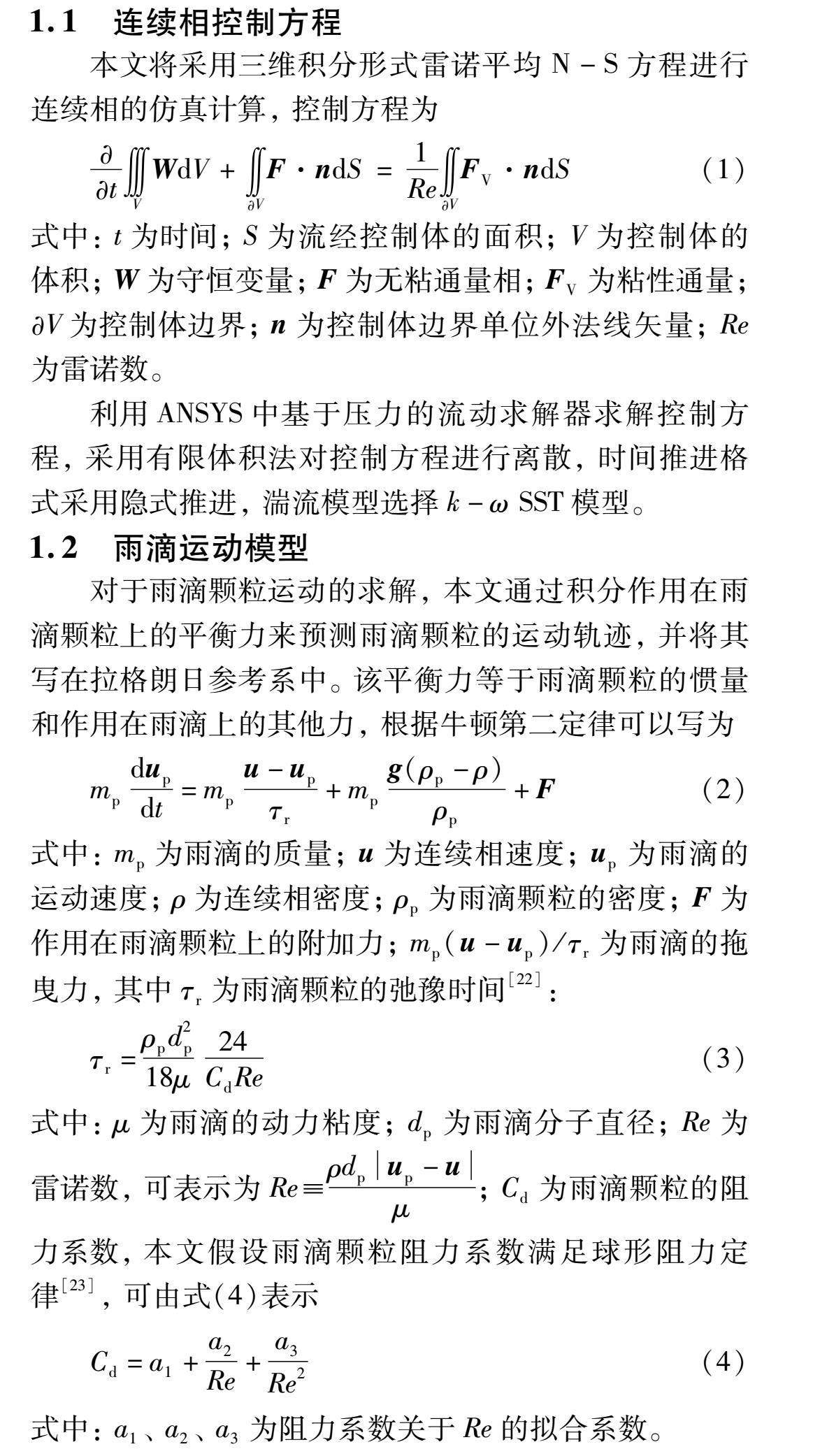
学术研究 | 暴雨条件下低速飞行器气动特性数值计算
学术研究 | 暴雨条件下低速飞行器气动特性数值计算













 登录
登录